Tutorial 4: Model-Based Reinforcement Learning
Contents
![]()

Tutorial 4: Model-Based Reinforcement Learning¶
Week 3, Day 4: Reinforcement Learning
By Neuromatch Academy
Content creators: Marcelo G Mattar, Eric DeWitt, Matt Krause, Matthew Sargent, Anoop Kulkarni, Sowmya Parthiban, Feryal Behbahani, Jane Wang
Content reviewers: Ella Batty, Byron Galbraith, Michael Waskom, Ezekiel Williams, Mehul Rastogi, Lily Cheng, Roberto Guidotti, Arush Tagade, Kelson Shilling-Scrivo
Production editors: Gagana B, Spiros Chavlis
Tutorial Objectives¶
Estimated timing of tutorial: 45 min
In this tutorial we will model a yet more complex agent that learns to predict not only rewards, but also how its actions affect the future states of the world. This extra information allows the agent to use “planning” to select its actions.
You will implement one of the simplest model-based Reinforcement Learning algorithms, Dyna-Q. You will understand what a world model is, how it can improve the agent’s policy, and the situations in which model-based algorithms are more advantageous than their model-free counterparts.
You will implement a model-based RL agent, Dyna-Q, that can solve a simple task;
You will investigate the effect of planning on the agent’s behavior;
You will compare the behaviors of a model-based and model-free agent in light of an environmental change.
Setup¶
⚠ Experimental LLM-enhanced tutorial ⚠
This notebook includes Neuromatch’s experimental Chatify 🤖 functionality. The Chatify notebook extension adds support for a large language model-based “coding tutor” to the materials. The tutor provides automatically generated text to help explain any code cell in this notebook.
Note that using Chatify may cause breaking changes and/or provide incorrect or misleading information. If you wish to proceed by installing and enabling the Chatify extension, you should run the next two code blocks (hidden by default). If you do not want to use this experimental version of the Neuromatch materials, please use the stable materials instead.
To use the Chatify helper, insert the %%explain magic command at the start of any code cell and then run it (shift + enter) to access an interface for receiving LLM-based assitance. You can then select different options from the dropdown menus depending on what sort of assitance you want. To disable Chatify and run the code block as usual, simply delete the %%explain command and re-run the cell.
Note that, by default, all of Chatify’s responses are generated locally. This often takes several minutes per response. Once you click the “Submit request” button, just be patient– stuff is happening even if you can’t see it right away!
Thanks for giving Chatify a try! Love it? Hate it? Either way, we’d love to hear from you about your Chatify experience! Please consider filling out our brief survey to provide feedback and help us make Chatify more awesome!
Run the next two cells to install and configure Chatify…
%pip install -q davos
import davos
davos.config.suppress_stdout = True
Note: you may need to restart the kernel to use updated packages.
smuggle chatify # pip: git+https://github.com/ContextLab/chatify.git
%load_ext chatify
Downloading and initializing model; this may take a few minutes...
llama.cpp: loading model from /home/runner/.cache/huggingface/hub/models--TheBloke--Llama-2-7B-Chat-GGML/snapshots/501a3c8182cd256a859888fff4e838c049d5d7f6/llama-2-7b-chat.ggmlv3.q5_1.bin
llama_model_load_internal: format = ggjt v3 (latest)
llama_model_load_internal: n_vocab = 32000
llama_model_load_internal: n_ctx = 512
llama_model_load_internal: n_embd = 4096
llama_model_load_internal: n_mult = 256
llama_model_load_internal: n_head = 32
llama_model_load_internal: n_layer = 32
llama_model_load_internal: n_rot = 128
llama_model_load_internal: freq_base = 10000.0
llama_model_load_internal: freq_scale = 1
llama_model_load_internal: ftype = 9 (mostly Q5_1)
llama_model_load_internal: n_ff = 11008
llama_model_load_internal: model size = 7B
llama_model_load_internal: ggml ctx size = 0.08 MB
llama_model_load_internal: mem required = 6390.60 MB (+ 1026.00 MB per state)
llama_new_context_with_model: kv self size = 256.00 MB
AVX = 1 | AVX2 = 1 | AVX512 = 1 | AVX512_VBMI = 0 | AVX512_VNNI = 0 | FMA = 1 | NEON = 0 | ARM_FMA = 0 | F16C = 1 | FP16_VA = 0 | WASM_SIMD = 0 | BLAS = 0 | SSE3 = 1 | VSX = 0 |
Install and import feedback gadget¶
# @title Install and import feedback gadget
!pip3 install vibecheck datatops --quiet
from vibecheck import DatatopsContentReviewContainer
def content_review(notebook_section: str):
return DatatopsContentReviewContainer(
"", # No text prompt
notebook_section,
{
"url": "https://pmyvdlilci.execute-api.us-east-1.amazonaws.com/klab",
"name": "neuromatch_cn",
"user_key": "y1x3mpx5",
},
).render()
feedback_prefix = "W3D4_T4"
# Imports
import numpy as np
import matplotlib.pyplot as plt
from scipy.signal import convolve as conv
Figure Settings¶
# @title Figure Settings
import logging
logging.getLogger('matplotlib.font_manager').disabled = True
%config InlineBackend.figure_format = 'retina'
plt.style.use("https://raw.githubusercontent.com/NeuromatchAcademy/course-content/main/nma.mplstyle")
Plotting Functions¶
#@title Plotting Functions
def plot_state_action_values(env, value, ax=None):
"""
Generate plot showing value of each action at each state.
"""
if ax is None:
fig, ax = plt.subplots()
for a in range(env.n_actions):
ax.plot(range(env.n_states), value[:, a], marker='o', linestyle='--')
ax.set(xlabel='States', ylabel='Values')
ax.legend(['R','U','L','D'], loc='lower right')
def plot_quiver_max_action(env, value, ax=None):
"""
Generate plot showing action of maximum value or maximum probability at
each state (not for n-armed bandit or cheese_world).
"""
if ax is None:
fig, ax = plt.subplots()
X = np.tile(np.arange(env.dim_x), [env.dim_y,1]) + 0.5
Y = np.tile(np.arange(env.dim_y)[::-1][:,np.newaxis], [1,env.dim_x]) + 0.5
which_max = np.reshape(value.argmax(axis=1), (env.dim_y,env.dim_x))
which_max = which_max[::-1,:]
U = np.zeros(X.shape)
V = np.zeros(X.shape)
U[which_max == 0] = 1
V[which_max == 1] = 1
U[which_max == 2] = -1
V[which_max == 3] = -1
ax.quiver(X, Y, U, V)
ax.set(
title='Maximum value/probability actions',
xlim=[-0.5, env.dim_x+0.5],
ylim=[-0.5, env.dim_y+0.5],
)
ax.set_xticks(np.linspace(0.5, env.dim_x-0.5, num=env.dim_x))
ax.set_xticklabels(["%d" % x for x in np.arange(env.dim_x)])
ax.set_xticks(np.arange(env.dim_x+1), minor=True)
ax.set_yticks(np.linspace(0.5, env.dim_y-0.5, num=env.dim_y))
ax.set_yticklabels(["%d" % y for y in np.arange(0, env.dim_y*env.dim_x, env.dim_x)])
ax.set_yticks(np.arange(env.dim_y+1), minor=True)
ax.grid(which='minor',linestyle='-')
def plot_heatmap_max_val(env, value, ax=None):
"""
Generate heatmap showing maximum value at each state
"""
if ax is None:
fig, ax = plt.subplots()
if value.ndim == 1:
value_max = np.reshape(value, (env.dim_y,env.dim_x))
else:
value_max = np.reshape(value.max(axis=1), (env.dim_y,env.dim_x))
value_max = value_max[::-1,:]
im = ax.imshow(value_max, aspect='auto', interpolation='none', cmap='afmhot')
ax.set(title='Maximum value per state')
ax.set_xticks(np.linspace(0, env.dim_x-1, num=env.dim_x))
ax.set_xticklabels(["%d" % x for x in np.arange(env.dim_x)])
ax.set_yticks(np.linspace(0, env.dim_y-1, num=env.dim_y))
if env.name != 'windy_cliff_grid':
ax.set_yticklabels(
["%d" % y for y in np.arange(
0, env.dim_y*env.dim_x, env.dim_x)][::-1])
return im
def plot_rewards(n_episodes, rewards, average_range=10, ax=None):
"""
Generate plot showing total reward accumulated in each episode.
"""
if ax is None:
fig, ax = plt.subplots()
smoothed_rewards = (conv(rewards, np.ones(average_range), mode='same')
/ average_range)
ax.plot(range(0, n_episodes, average_range),
smoothed_rewards[0:n_episodes:average_range],
marker='o', linestyle='--')
ax.set(xlabel='Episodes', ylabel='Total reward')
def plot_performance(env, value, reward_sums):
fig, axes = plt.subplots(nrows=2, ncols=2, figsize=(16, 12))
plot_state_action_values(env, value, ax=axes[0,0])
plot_quiver_max_action(env, value, ax=axes[0,1])
plot_rewards(n_episodes, reward_sums, ax=axes[1,0])
im = plot_heatmap_max_val(env, value, ax=axes[1,1])
fig.colorbar(im)
Helper Functions¶
#@title Helper Functions
def epsilon_greedy(q, epsilon):
"""Epsilon-greedy policy: selects the maximum value action with probabilty
(1-epsilon) and selects randomly with epsilon probability.
Args:
q (ndarray): an array of action values
epsilon (float): probability of selecting an action randomly
Returns:
int: the chosen action
"""
be_greedy = np.random.random() > epsilon
if be_greedy:
action = np.argmax(q)
else:
action = np.random.choice(len(q))
return action
def q_learning(state, action, reward, next_state, value, params):
"""Q-learning: updates the value function and returns it.
Args:
state (int): the current state identifier
action (int): the action taken
reward (float): the reward received
next_state (int): the transitioned to state identifier
value (ndarray): current value function of shape (n_states, n_actions)
params (dict): a dictionary containing the default parameters
Returns:
ndarray: the updated value function of shape (n_states, n_actions)
"""
# value of previous state-action pair
prev_value = value[int(state), int(action)]
# maximum Q-value at current state
if next_state is None or np.isnan(next_state):
max_value = 0
else:
max_value = np.max(value[int(next_state)])
# reward prediction error
delta = reward + params['gamma'] * max_value - prev_value
# update value of previous state-action pair
value[int(state), int(action)] = prev_value + params['alpha'] * delta
return value
def learn_environment(env, model_updater, planner, params, max_steps,
n_episodes, shortcut_episode=None):
# Start with a uniform value function
value = np.ones((env.n_states, env.n_actions))
# Run learning
reward_sums = np.zeros(n_episodes)
episode_steps = np.zeros(n_episodes)
# Dyna-Q state
model = np.nan*np.zeros((env.n_states, env.n_actions, 2))
# Loop over episodes
for episode in range(n_episodes):
if shortcut_episode is not None and episode == shortcut_episode:
env.toggle_shortcut()
state = 64
action = 1
next_state, reward = env.get_outcome(state, action)
model[state, action] = reward, next_state
value = q_learning(state, action, reward, next_state, value, params)
state = env.init_state # initialize state
reward_sum = 0
for t in range(max_steps):
# choose next action
action = epsilon_greedy(value[state], params['epsilon'])
# observe outcome of action on environment
next_state, reward = env.get_outcome(state, action)
# sum rewards obtained
reward_sum += reward
# update value function
value = q_learning(state, action, reward, next_state, value, params)
# update model
model = model_updater(model, state, action, reward, next_state)
# execute planner
value = planner(model, value, params)
if next_state is None:
break # episode ends
state = next_state
reward_sums[episode] = reward_sum
episode_steps[episode] = t+1
return value, reward_sums, episode_steps
class world(object):
def __init__(self):
return
def get_outcome(self):
print("Abstract method, not implemented")
return
def get_all_outcomes(self):
outcomes = {}
for state in range(self.n_states):
for action in range(self.n_actions):
next_state, reward = self.get_outcome(state, action)
outcomes[state, action] = [(1, next_state, reward)]
return outcomes
class QuentinsWorld(world):
"""
World: Quentin's world.
100 states (10-by-10 grid world).
The mapping from state to the grid is as follows:
90 ... 99
...
40 ... 49
30 ... 39
20 21 22 ... 29
10 11 12 ... 19
0 1 2 ... 9
54 is the start state.
Actions 0, 1, 2, 3 correspond to right, up, left, down.
Moving anywhere from state 99 (goal state) will end the session.
Landing in red states incurs a reward of -1.
Landing in the goal state (99) gets a reward of 1.
Going towards the border when already at the border will stay in the same
place.
"""
def __init__(self):
self.name = "QuentinsWorld"
self.n_states = 100
self.n_actions = 4
self.dim_x = 10
self.dim_y = 10
self.init_state = 54
self.shortcut_state = 64
def toggle_shortcut(self):
if self.shortcut_state == 64:
self.shortcut_state = 2
else:
self.shortcut_state = 64
def get_outcome(self, state, action):
if state == 99: # goal state
reward = 0
next_state = None
return next_state, reward
reward = 0 # default reward value
if action == 0: # move right
next_state = state + 1
if state == 98: # next state is goal state
reward = 1
elif state % 10 == 9: # right border
next_state = state
elif state in [11, 21, 31, 41, 51, 61, 71,
12, 72,
73,
14, 74,
15, 25, 35, 45, 55, 65, 75]: # next state is red
reward = -1
elif action == 1: # move up
next_state = state + 10
if state == 89: # next state is goal state
reward = 1
if state >= 90: # top border
next_state = state
elif state in [2, 12, 22, 32, 42, 52, 62,
3, 63,
self.shortcut_state,
5, 65,
6, 16, 26, 36, 46, 56, 66]: # next state is red
reward = -1
elif action == 2: # move left
next_state = state - 1
if state % 10 == 0: # left border
next_state = state
elif state in [17, 27, 37, 47, 57, 67, 77,
16, 76,
75,
14, 74,
13, 23, 33, 43, 53, 63, 73]: # next state is red
reward = -1
elif action == 3: # move down
next_state = state - 10
if state <= 9: # bottom border
next_state = state
elif state in [22, 32, 42, 52, 62, 72, 82,
23, 83,
84,
25, 85,
26, 36, 46, 56, 66, 76, 86]: # next state is red
reward = -1
else:
print("Action must be between 0 and 3.")
next_state = None
reward = None
return int(next_state) if next_state is not None else None, reward
Section 1: Model-based RL¶
Video 1: Model-based RL¶
Submit your feedback¶
# @title Submit your feedback
content_review(f"{feedback_prefix}_ModelBased_RL_Video")
The algorithms introduced in the previous tutorials are all model-free, as they do not require a model to use or control behavior. In this section, we will study a different class of algorithms called model-based. As we will see next, in contrast to model-free RL, model-based methods use a model to build a policy.
But what is a model? A model (sometimes called a world model or internal model) is a representation of how the world will respond to the agent’s actions. You can think of it as a representation of how the world works. With such a representation, the agent can simulate new experiences and learn from these simulations. This is advantageous for two reasons. First, acting in the real world can be costly and sometimes even dangerous: remember Cliff World from Tutorial 3? Learning from simulated experience can avoid some of these costs or risks. Second, simulations make fuller use of one’s limited experience. To see why, imagine an agent interacting with the real world. The information acquired with each individual action can only be assimilated at the moment of the interaction. In contrast, the experiences simulated from a model can be simulated multiple times – and whenever desired – allowing for the information to be more fully assimilated.
Quentin’s World Environment
In this tutorial, our RL agent will act in the Quentin’s world, a 10x10 grid world.
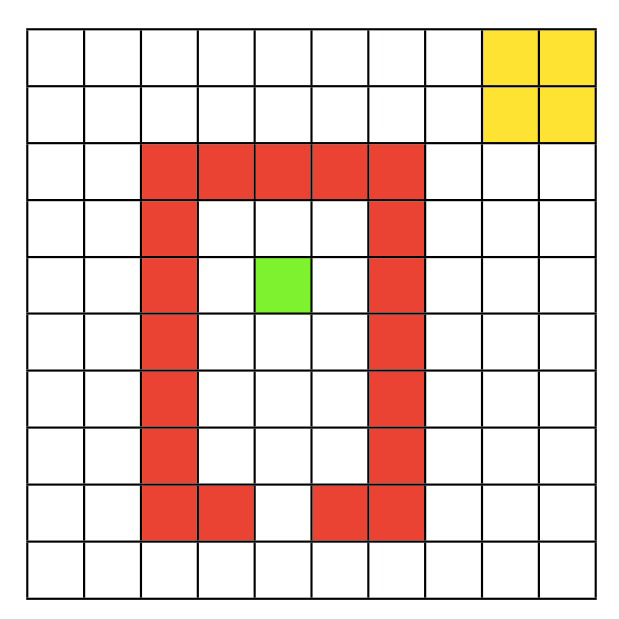
In this environment, there are 100 states and 4 possible actions: right, up, left, and down. The goal of the agent is to move, via a series of steps, from the start (green) location to the goal (yellow) region, while avoiding the red walls. More specifically:
The agent starts in the green state,
Moving into one of the red states incurs a reward of -1,
Moving into the world borders stays in the same place,
Moving into the goal state (yellow square in the upper right corner) gives you a reward of 1, and
Moving anywhere from the goal state ends the episode.
Now that we have our environment and task defined, how can we solve this using a model-based RL agent?
Section 2: Dyna-Q¶
Estimated timing to here from start of tutorial: 11 min
In this section, we will implement Dyna-Q, one of the simplest model-based reinforcement learning algorithms. A Dyna-Q agent combines acting, learning, and planning. The first two components – acting and learning – are just like what we have studied previously. Q-learning, for example, learns by acting in the world, and therefore combines acting and learning. But a Dyna-Q agent also implements planning, or simulating experiences from a model–and learns from them.
In theory, one can think of a Dyna-Q agent as implementing acting, learning, and planning simultaneously, at all times. But, in practice, one needs to specify the algorithm as a sequence of steps. The most common way in which the Dyna-Q agent is implemented is by adding a planning routine to a Q-learning agent: after the agent acts in the real world and learns from the observed experience, the agent is allowed a series of \(k\) planning steps. At each one of those \(k\) planning steps, the model generates a simulated experience by randomly sampling from the history of all previously experienced state-action pairs. The agent then learns from this simulated experience, again using the same Q-learning rule that you implemented for learning from real experience. This simulated experience is simply a one-step transition, i.e., a state, an action, and the resulting state and reward. So, in practice, a Dyna-Q agent learns (via Q-learning) from one step of real experience during acting, and then from k steps of simulated experience during planning.
There’s one final detail about this algorithm: where does the simulated experiences come from or, in other words, what is the “model”? In Dyna-Q, as the agent interacts with the environment, the agent also learns the model. For simplicity, Dyna-Q implements model-learning in an almost trivial way, as simply caching the results of each transition. Thus, after each one-step transition in the environment, the agent saves the results of this transition in a big matrix, and consults that matrix during each of the planning steps. Obviously, this model-learning strategy only makes sense if the world is deterministic (so that each state-action pair always leads to the same state and reward), and this is the setting of the exercise below. However, even this simple setting can already highlight one of Dyna-Q major strengths: the fact that the planning is done at the same time as the agent interacts with the environment, which means that new information gained from the interaction may change the model and thereby interact with planning in potentially interesting ways.
Since you already implemented Q-learning in the previous tutorial, we will focus here on the extensions new to Dyna-Q: the model update step and the planning step. For reference, here’s the Dyna-Q algorithm that you will help implement:
TABULAR DYNA-Q
Initialize \(Q(s,a)\) and \(Model(s,a)\) for all \(s \in S\) and \(a \in A\).
Loop forever:
(a) \(S\) ← current (nonterminal) state
(b) \(A\) ← \(\epsilon\)-greedy\((S,Q)\)
(c) Take action \(A\); observe resultant reward, \(R\), and state, \(S'\)
(d) \(Q(S,A)\) ← \(Q(S,A) + \alpha \left[R + \gamma \max_{a} Q(S',a) - Q(S,A)\right]\)
(e) \(Model(S,A)\) ← \(R,S'\) (assuming deterministic environment)
(f) Loop repeat \(k\) times:\(S\) ← random previously observed state
\(A\) ← random action previously taken in \(S\)
\(R,S'\) ← \(Model(S,A)\)
\(Q(S,A)\) ← \(Q(S,A) + \alpha \left[R + \gamma \max_{a} Q(S',a) - Q(S,A)\right]\)
Coding Exercise 2.1: Dyna-Q Model Update¶
In this exercise you will implement the model update portion of the Dyna-Q algorithm. More specifically, after each action that the agent executes in the world, we need to update our model to remember what reward and next state we last experienced for the given state-action pair.
def dyna_q_model_update(model, state, action, reward, next_state):
""" Dyna-Q model update
Args:
model (ndarray): An array of shape (n_states, n_actions, 2) that represents
the model of the world i.e. what reward and next state do
we expect from taking an action in a state.
state (int): the current state identifier
action (int): the action taken
reward (float): the reward received
next_state (int): the transitioned to state identifier
Returns:
ndarray: the updated model
"""
###############################################################
## TODO for students: implement the model update step of Dyna-Q
# Fill out function and remove
raise NotImplementedError("Student exercise: implement the model update step of Dyna-Q")
###############################################################
# Update our model with the observed reward and next state
model[...] = ...
return model
Submit your feedback¶
# @title Submit your feedback
content_review(f"{feedback_prefix}_DynaQ_model_update_Exercise")
Now that we have a way to update our model, we can use it in the planning phase of Dyna-Q to simulate past experiences.
Coding Exercise 2.2: Dyna-Q Planning¶
In this exercise you will implement the other key part of Dyna-Q: planning. We will sample a random state-action pair from those we’ve experienced, use our model to simulate the experience of taking that action in that state, and update our value function using Q-learning with these simulated state, action, reward, and next state outcomes. Furthermore, we want to run this planning step \(k\) times, which can be obtained from params['k'].
For this exercise, you may use the q_learning function to handle the Q-learning value function update. Recall that the method signature is q_learning(state, action, reward, next_state, value, params) and it returns the updated value table.
After completing this function, we have a way to update our model and a means to use it in planning so we will see it in action. The code sets up our agent parameters and learning environment, then passes your model update and planning methods to the agent to try and solve Quentin’s World. Notice that we set the number of planning steps \(k=10\).
def dyna_q_planning(model, value, params):
""" Dyna-Q planning
Args:
model (ndarray): An array of shape (n_states, n_actions, 2) that represents
the model of the world i.e. what reward and next state do
we expect from taking an action in a state.
value (ndarray): current value function of shape (n_states, n_actions)
params (dict): a dictionary containing learning parameters
Returns:
ndarray: the updated value function of shape (n_states, n_actions)
"""
############################################################
## TODO for students: implement the planning step of Dyna-Q
# Fill out function and remove
raise NotImplementedError("Student exercise: implement the planning step of Dyna-Q")
#############################################################
# Perform k additional updates at random (planning)
for _ in range(...):
# Find state-action combinations for which we've experienced a reward i.e.
# the reward value is not NaN. The outcome of this expression is an Nx2
# matrix, where each row is a state and action value, respectively.
candidates = np.array(np.where(~np.isnan(model[:,:,0]))).T
# Write an expression for selecting a random row index from our candidates
idx = ...
# Obtain the randomly selected state and action values from the candidates
state, action = ...
# Obtain the expected reward and next state from the model
reward, next_state = ...
# Update the value function using Q-learning
value = ...
return value
# set for reproducibility, comment out / change seed value for different results
np.random.seed(1)
# parameters needed by our policy and learning rule
params = {
'epsilon': 0.05, # epsilon-greedy policy
'alpha': 0.5, # learning rate
'gamma': 0.8, # temporal discount factor
'k': 10, # number of Dyna-Q planning steps
}
# episodes/trials
n_episodes = 500
max_steps = 1000
# environment initialization
env = QuentinsWorld()
# solve Quentin's World using Dyna-Q
results = learn_environment(env, dyna_q_model_update, dyna_q_planning,
params, max_steps, n_episodes)
value, reward_sums, episode_steps = results
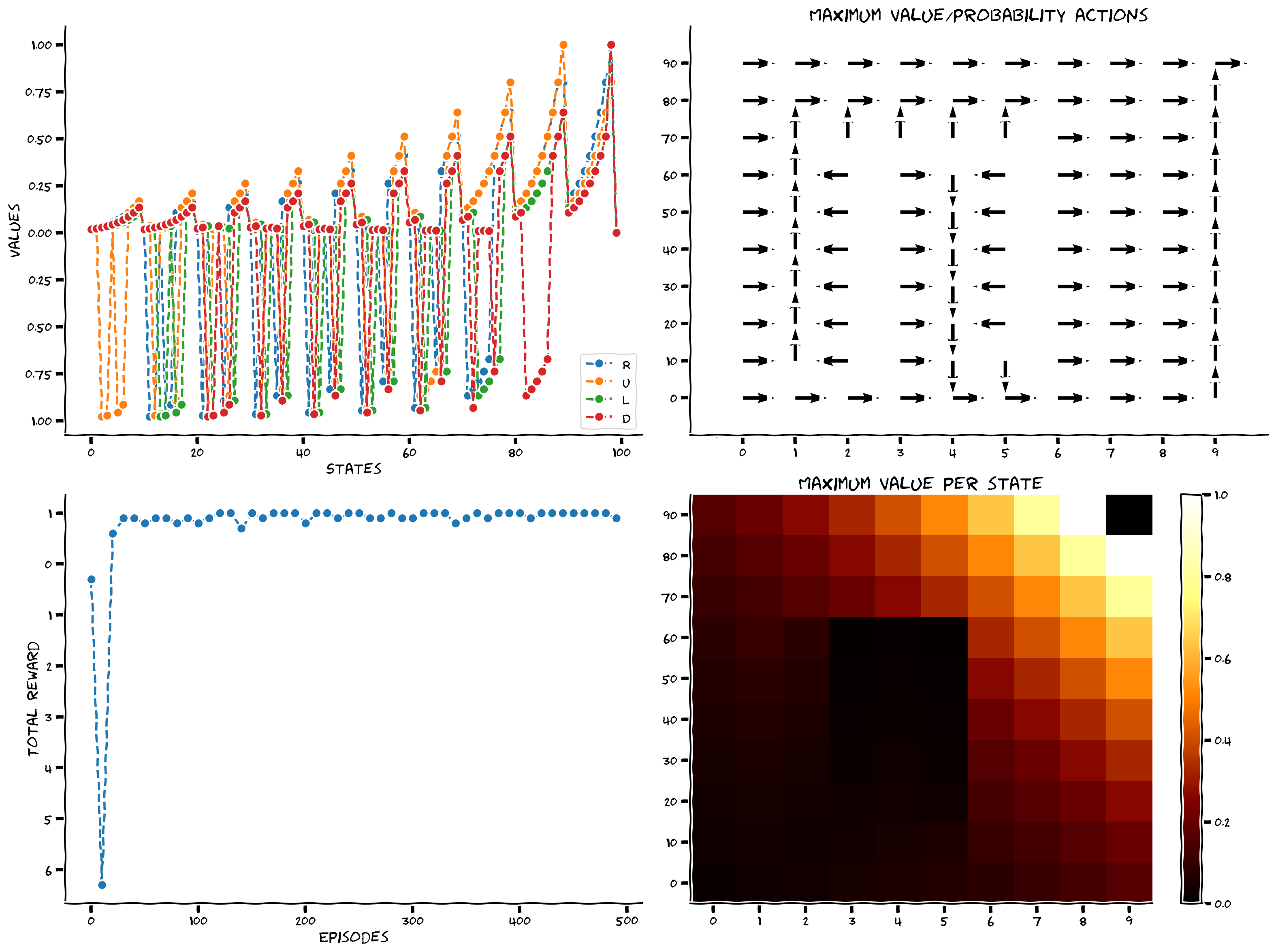
# Plot the results
plot_performance(env, value, reward_sums)
Example output:
Submit your feedback¶
# @title Submit your feedback
content_review(f"{feedback_prefix}_DynaQ_planning_Exercise")
Upon completion, we should see that our Dyna-Q agent is able to solve the task quite quickly, achieving a consistent positive reward after only a limited number of episodes (bottom left).
Section 3: How much to plan?¶
Estimated timing to here from start of tutorial: 30 min
Now that you implemented a Dyna-Q agent with \(k=10\), we will try to understand the effect of planning on performance. How does changing the value of \(k\) impact our agent’s ability to learn?
The following code is similar to what we just ran, only this time we run several experiments over several different values of \(k\) to see how their average performance compares. In particular, we will choose \(k \in \{0, 1, 10, 100\}\). Pay special attention to the case where \(k = 0\) which corresponds to no planning. This is, in effect, just regular Q-learning.
The following code will take a bit of time to complete. To speed things up, try lowering the number of experiments or the number of \(k\) values to compare.
# set for reproducibility, comment out / change seed value for different results
np.random.seed(1)
# parameters needed by our policy and learning rule
params = {
'epsilon': 0.05, # epsilon-greedy policy
'alpha': 0.5, # learning rate
'gamma': 0.8, # temporal discount factor
}
# episodes/trials
n_experiments = 10
n_episodes = 100
max_steps = 1000
# number of planning steps
planning_steps = np.array([0, 1, 10, 100])
# environment initialization
env = QuentinsWorld()
steps_per_episode = np.zeros((len(planning_steps), n_experiments, n_episodes))
for i, k in enumerate(planning_steps):
params['k'] = k
for experiment in range(n_experiments):
results = learn_environment(env, dyna_q_model_update, dyna_q_planning,
params, max_steps, n_episodes)
steps_per_episode[i, experiment] = results[2]
# Average across experiments
steps_per_episode = np.mean(steps_per_episode, axis=1)
# Plot results
fig, ax = plt.subplots()
ax.plot(steps_per_episode.T)
ax.set(xlabel='Episodes', ylabel='Steps per episode',
xlim=[20, None], ylim=[0, 160])
ax.legend(planning_steps, loc='upper right', title="Planning steps");
After an initial warm-up phase of the first 20 episodes, we should see that the number of planning steps has a noticeable impact on our agent’s ability to rapidly solve the environment. We should also notice that after a certain value of \(k\) our relative utility goes down, so it’s important to balance a large enough value of \(k\) that helps us learn quickly without wasting too much time in planning.
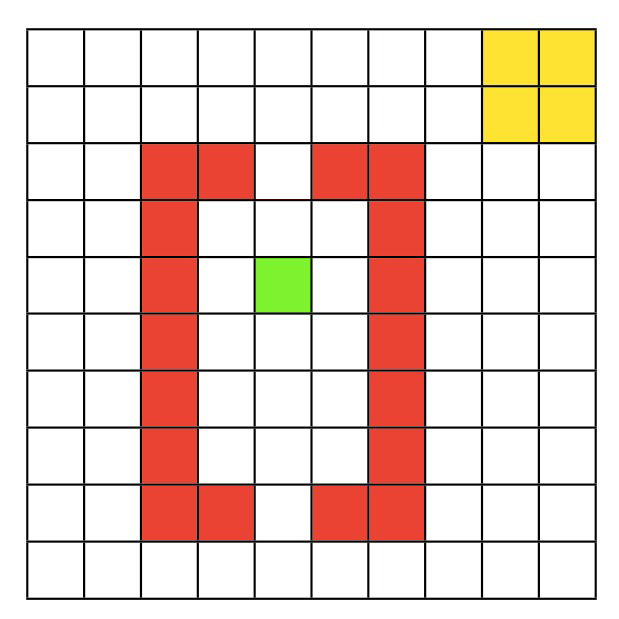
Section 4: When the world changes…¶
Estimated timing to here from start of tutorial: 37 min
In addition to speeding up learning about a new environment, planning can also help the agent to quickly incorporate new information about the environment into its policy. Thus, if the environment changes (e.g. the rules governing the transitions between states, or the rewards associated with each state/action), the agent doesn’t need to experience that change repeatedly (as would be required in a Q-learning agent) in real experience. Instead, planning allows that change to be incorporated quickly into the agent’s policy, without the need to experience the change more than once.
In this final section, we will again have our agents attempt to solve Quentin’s World. However, after 200 episodes, a shortcut will appear in the environment. We will test how a model-free agent using Q-learning and a Dyna-Q agent adapt to this change in the environment.
The following code again looks similar to what we’ve run previously. Just as above we will have multiple values for \(k\), with \(k=0\) representing our Q-learning agent and \(k=10\) for our Dyna-Q agent with 10 planning steps. The main difference is we now add in an indicator as to when the shortcut appears. In particular, we will run the agents for 400 episodes, with the shortcut appearing in the middle after episode #200.
When this shortcut appears we will also let each agent experience this change once i.e. we will evaluate the act of moving upwards when in the state that is below the now-open shortcut. After this single demonstration, the agents will continue on interacting in the environment.
# set for reproducibility, comment out / change seed value for different results
np.random.seed(1)
# parameters needed by our policy and learning rule
params = {
'epsilon': 0.05, # epsilon-greedy policy
'alpha': 0.5, # learning rate
'gamma': 0.8, # temporal discount factor
}
# episodes/trials
n_episodes = 400
max_steps = 1000
shortcut_episode = 200 # when we introduce the shortcut
# number of planning steps
planning_steps = np.array([0, 10]) # Q-learning, Dyna-Q (k=10)
# environment initialization
steps_per_episode = np.zeros((len(planning_steps), n_episodes))
# Solve Quentin's World using Q-learning and Dyna-Q
for i, k in enumerate(planning_steps):
env = QuentinsWorld()
params['k'] = k
results = learn_environment(env, dyna_q_model_update, dyna_q_planning,
params, max_steps, n_episodes,
shortcut_episode=shortcut_episode)
steps_per_episode[i] = results[2]
# Plot results
fig, ax = plt.subplots()
ax.plot(steps_per_episode.T)
ax.set(xlabel='Episode', ylabel='Steps per Episode',
xlim=[20,None], ylim=[0, 160])
ax.axvline(shortcut_episode, linestyle="--", color='gray', label="Shortcut appears")
ax.legend(('Q-learning', 'Dyna-Q', 'Shortcut appears'),
loc='upper right');
If all went well, we should see the Dyna-Q agent having already achieved near optimal performance before the appearance of the shortcut and then immediately incorporating this new information to further improve. In this case, the Q-learning agent takes much longer to fully incorporate the new shortcut.
Summary¶
Estimated timing of tutorial: 45 min
In this notebook, you have learned about model-based reinforcement learning and implemented one of the simplest architectures of this type, Dyna-Q. Dyna-Q is very much like Q-learning, but instead of learning only from real experience, you also learn from simulated experience. This small difference, however, can have huge benefits! Planning frees the agent from the limitation of its own environment, and this in turn allows the agent to speed-up learning – for instance, effectively incorporating environmental changes into one’s policy.
Not surprisingly, model-based RL is an active area of research in machine learning. Some of the exciting topics in the frontier of the field involve (i) learning and representing a complex world model (i.e., beyond the tabular and deterministic case above), and (ii) what to simulate – also known as search control – (i.e., beyond the random selection of experiences implemented above).
The framework above has also been used in neuroscience to explain various phenomena such as planning, memory sampling, memory consolidation, and even dreaming!